Moisture-Responsive Biomimetic
Graphene Robots by Photoreduction
Chao Lv(1), Dong-Dong Han(1), Hong Xia(1), Yong-Lai Zhang(1), Hong-Bo Sun(1), Wen-Jing Tian(2)
1 State Key Laboratory of Integrated Optoelectronics, Jilin University, Changchun 130012, China
2 State Key Laboratory of Supramolecular Structure and Materials, Jilin University, Changchun, 130012, China
Humidity-responsive behaviors are widely spread in nature, the capability to convert simple environmental humidity stimuli into mechanical reversible motion is regularly observed in living systems, particularly plants [1]. Inspired by nature, moisture-responsive materials have awoken great interest and become the promising candidates for broad applications. Graphene oxide (GO) is very sensitive to environmental humidity due to the presence of a large amount of oxygen containing groups. Taking advantage of the strong interaction with water molecules, GO have been successfully employed to fabricate humidity responsive actuators. In this work, a self-controlled photoreduction GO (RGO) paper has been applied to prepare GO/RGO bilayer structures by using sunlight as an irradiation source [2, 3]. The resultant GO/RGO bilayer paper shows moisture-responsive properties under humid conditions due to anisotropic water-molecule adsorption (Fig. 1a-b). An obvious moisture-responsive bending phenomenon could be observed under the driven of moisture and the bending curvature increase gradually as relative humidity increased. Based on the unique property, a smart claw is presented, and it could bend when approaching a sweaty human finger and a polymer foam block can be grabbed using the claw (Fig. 1c-g). Other typical smart actuators such as orientable transporter and crawler paper robot have been designed and showed excellent performance (Fig. 2). This kind of moisture-responsive GO/RGO paper may hold great promise for the development of graphene-based smart robots.
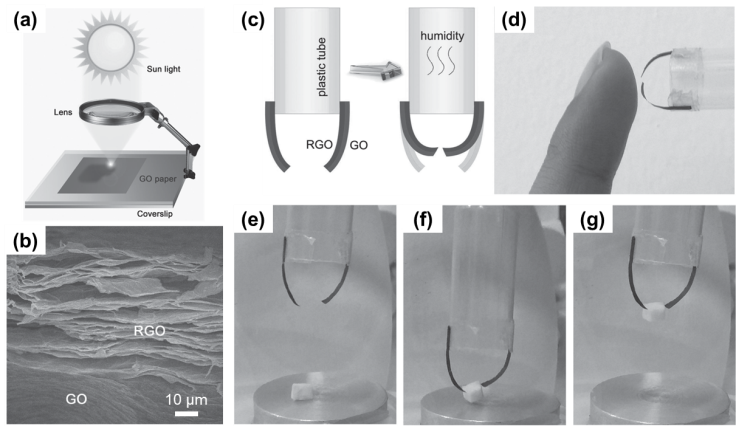
Fig. 1 (a) Schematic illustration for the fabrication of GO/RGO bilayer papers using focused sunlight reduction. (b) SEM image of the section view of GO/RGO bilayer paper. (c) Schematic illustration of the structure of the smart claw. (d-g) The moisture-responsive performance of a smart claw.
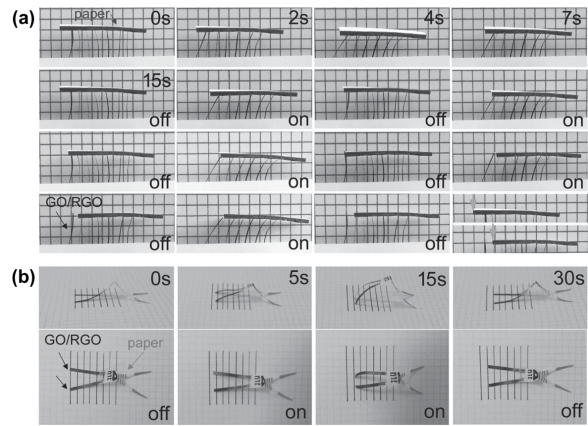
Fig. 1 (a) Schematic illustration for the fabrication of GO/RGO bilayer papers using focused sunlight reduction. (b) SEM image of the section view of GO/RGO bilayer paper. (c) Schematic illustration of the structure of the smart claw. (d-g) The moisture-responsive performance of a smart claw. Fig. 2 (a) An orientable transporter fabricated by assembling 7 upright GO/RGO ribbons into a linear array. The transporter could be used to drive a paper slice towards right. (b) A humidity-driven crawler paper robot fabricated by using GO/RGO bilayer paper as smart legs.